Space-time discretisation¶
The space-time domain \(X\) is discretised as a rectangular grid \(X_d\) with \(N\) steps of length \(\Delta x\) in space and \(K\) steps of length \(\Delta t\) in time.
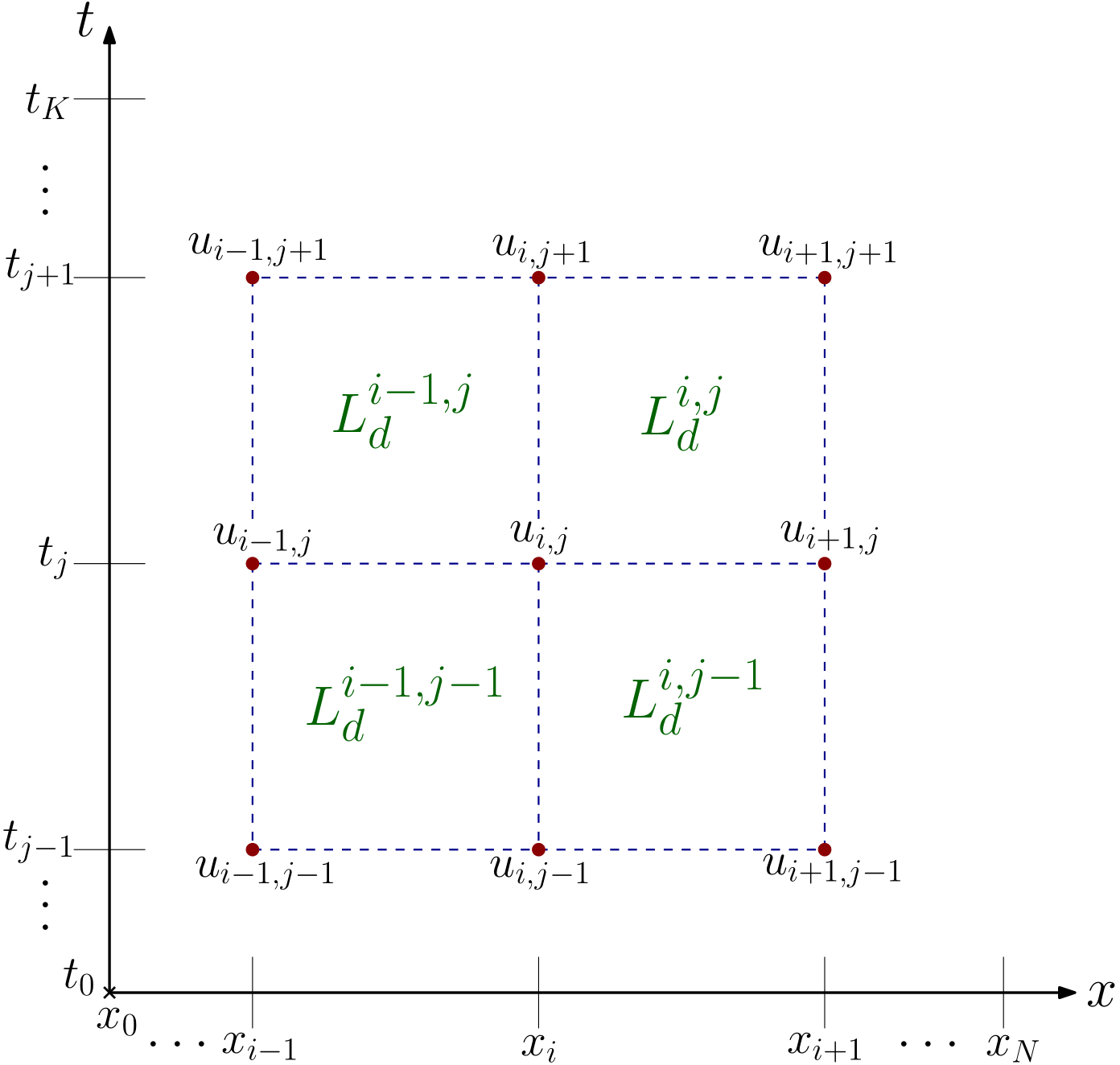
Figure 1. Discretised space-time domain with the representation of transverse deformations and discrete Lagrangians¶
The field is, thus, discretised by an indexed collection \(u_d = \{ u_{i,j} \in \mathbb{R} \;\vert\; i = 0, \dots, N,\, j = 0, \dots, K\}\). For each rectangular element with nodes \(\square_{i,j} = \{ (i,j), (i+1, j), (i, j+1), (i+1, j+1)\}\), we have a discrete Lagrangian \(L_d \,:\, \square_{i,j} \to \mathbb{R}\), \(L_d \left(u_{i,j},u_{i+1,j},u_{i,j+1},u_{i+1,j+1} \right)\), abbreviated as \(L^{i,j}_d\).
The trapezoidal quadrature rule is used to approximate the continuous action over each rectangle \(\square_{i,j}\). Then:
The associated discrete action is:
The discrete solution field satisfies a discretised version of Hamilton’s principle. In other words, discrete physical trajectories are stationary points of the associated discrete action. The resulting discrete Euler-Lagrange equations at node \((i,j)\) are:
\[\begin{aligned} D_4 L^{i-1,j-1}_d + D_3 L^{i,j-1}_d + D_2 L^{i-1,j}_d + D_1 L^{i,j}_d = 0 \end{aligned}\]
Notice that these involve the discrete Lagrangians of all the rectangles containing \((i,j)\).
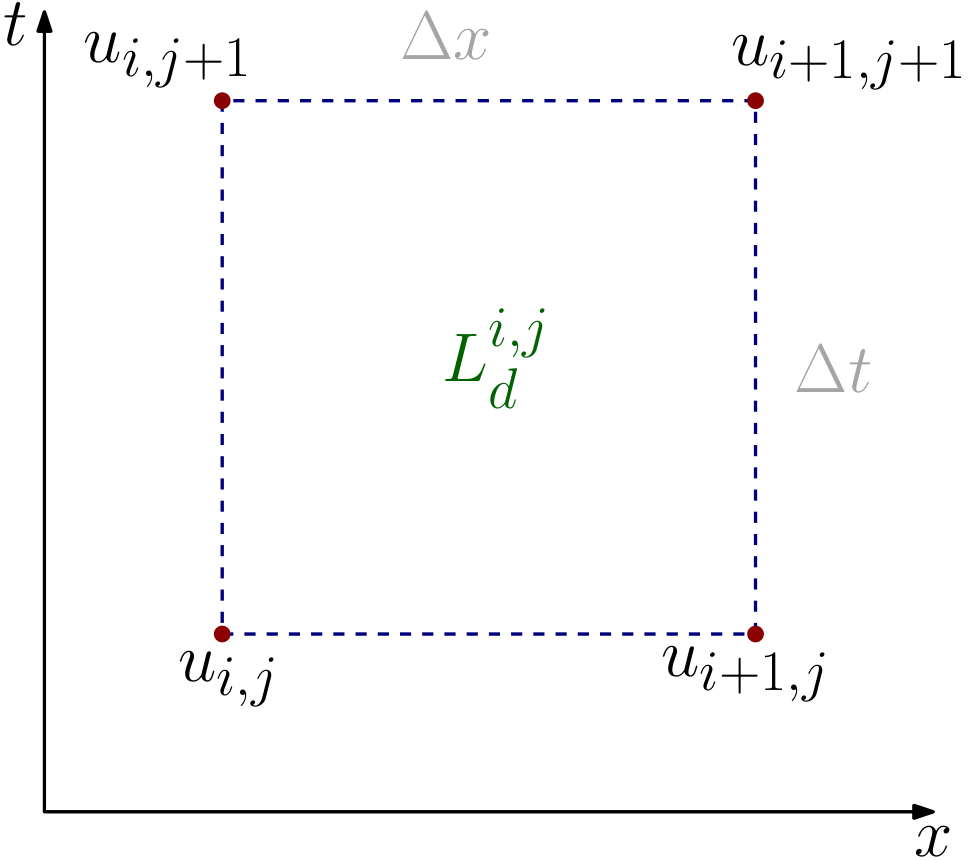
Figure 3. Discrete Lagrangian in the space-time domain¶
Boundary conditions¶
At the boundaries, initial (for \(t = 0\)) and boundary conditions (for \(x = 0\) and \(x = l\)) need to be taken into account to solve the problem.
To implement these, it is important to understand the meaning of the derivatives \(D_k L^{i,j}_d\), \(k = 1, \dots, 4\) and their relation to the canonical momenta, see the picture below. In our case, these derivatives can be interpreted as
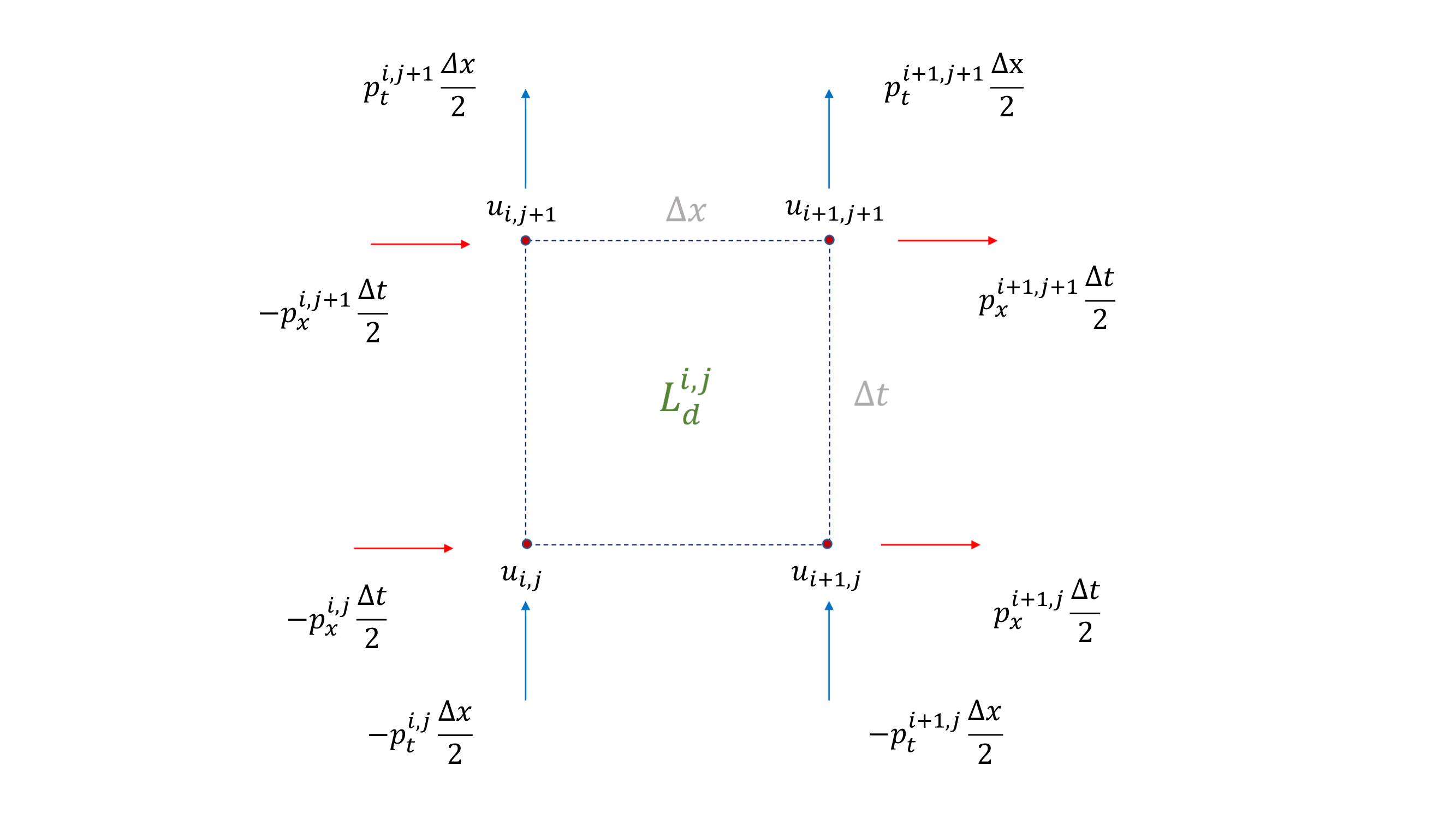
Figure 2. Representation of the momenta in the space-time domain¶
Currently, the following conditions are hardcoded:
To implement the first, all nodes \(u_{i,0}\) have been fixed to their corresponding values, \(\sin(\pi i \Delta x)\), and for the latter two, \(u_{0,j}\) and \(u_{N,j}\) have been set to zero. To implement the second, we make use of the above interpretation to write and solve the equations,
where, in our case, \(p_t = \dot{u}\).